First of all we should understand the concept of electric DC motors, an electric motor is a machine that converts electrical energy into mechanical energy. Most of the electric motors operate through the interaction between electric motor’s magnetic field and winding currents to generate force within the motor. In certain applications, such as in the transportation industry with traction motors, electric motors can operate in both motoring and generating or braking modes to also produce electrical energy from mechanical energy.
Principle of Operation for DC Motors
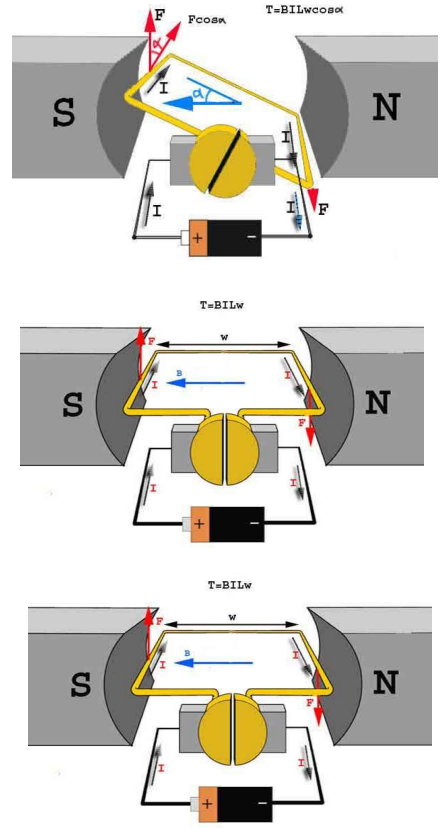
When a current carrying conductor is placed in a magnetic field, it experiences a torque and has a tendency to move. This is known as motoring action. If the direction of current in the wire is reversed, the direction of rotation also reverses. When magnetic field and electric field interact they produce a mechanical force, and based on that the working principle of dc motor established.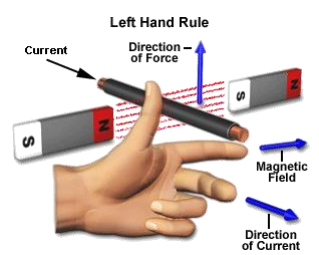
The direction of rotation of a DC electric motor is given by Fleming’s left hand rule, which states that if the index finger, middle finger and thumb of your left hand are extended mutually perpendicular to each other and if the index finger represents the direction of magnetic field, middle finger indicates the direction of current, then the thumb represents the direction in which force is experienced by the shaft of the dc motor.
In a DC motor electrical energy is provided to the input port and we can derive mechanical energy from the output port. Refer below block diagram to understand the principle of DC motor.
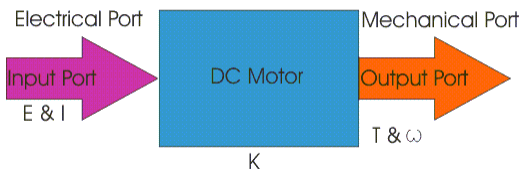
Supply voltage E and current I is given to the electrical or input port and we derive the mechanical output i.e. torque T and speed ω from the mechanical or output port. The input and output port variables of the Direct Current Motor are related by the parameter K. ∴ T = K.I & E = K.ω
Types of DC Motors
We can classify DC Motors based upon the way of connecting the armature and field winding of motor:
- DC Shunt Motor: The armature and field winding are connected in parallel across the supply voltage. These motors are constant speed motors, hence used in applications requiring constant speed i.e. Lathe machine, Drilling machine, Grinders, Blowers & Compressors etc.
- DC Series Motor: In this type of DC motor the armature and field windings are connected in series. These motors are useful in applications where starting torque required is high with quick acceleration i.e. Traction, Hoists, Lifts, Cranes, Rolling mills & Conveyors etc.
- DC Compound Motor which are further classified in Short shunt compound, long shunt compound, Cumulative Compound, Differential Cumulative Compound: The DC compound motor is a combination of the series motor and the shunt motor. It has a series field winding that is connected in series with the armature and a shunt field that is in parallel with the armature. The combination of series and shunt winding allows the motor to have the torque characteristics of the series motor and the regulated speed characteristics of the shunt motor. cumulative compound motors are used for different applications i.e. Elevators, Rolling mills, Punches, Shears & planers etc.
Construction of DC Motors
The output of a DC Motor i.e. conversion of Electrical energy to mechanical energy is essentially brought into occurrence by two major parts required for the construction of dc motors:
- Stator – The static part that houses the field windings and receives the supply
- Rotor – The rotating part that brings about the mechanical rotations.
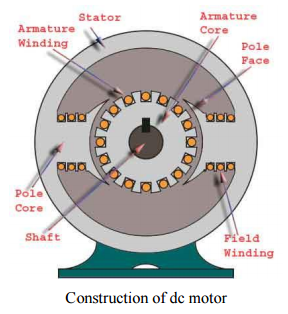
In addition to above mentioned parts and as shown in above picture below is list of other parts of DC Motor:
- Yoke of dc motor
- Poles of dc motor
- Field winding of dc motor.
- Armature winding of dc motor
- Commutator of dc motor
- Brushes of dc motor
As already mentioned above three types of electrical connections between the stator and rotor are possible for DC electric motors i.e. series, shunt/parallel and compound.
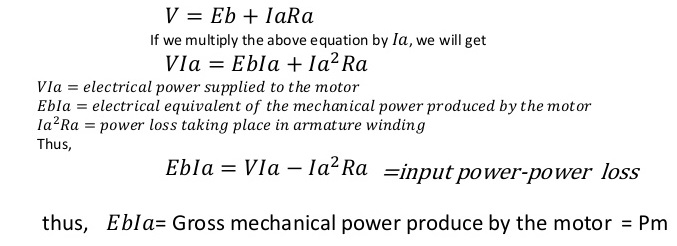
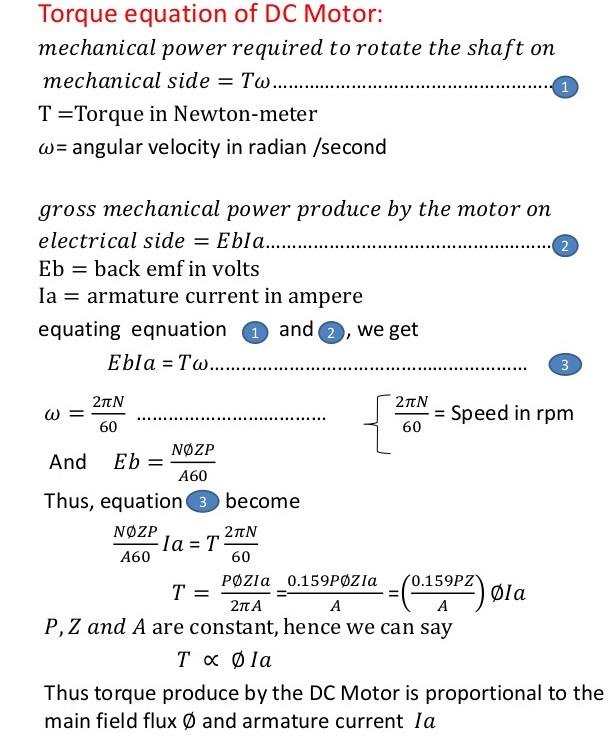
Voltage & Power Equation of DC Motor
Speed Control of DC Motors
The speed equation of dc motor is ? ∝ ??/∅ ∝ (?−????)/∅
But the resistance of armature winding or series field winding in dc series motor are small. Therefore the voltage drop ???? or ??(?? + ? ?) across them will be negligible as compare to the external supply voltage V in above equation.
Therefore ? ∝ ?/∅ , since V >>>> ???? so we can say
- Speed is inversely proportional to flux ∅.
- Speed is directly proportional to armature voltage.
- Speed is directly proportional to applied voltage V.
So by varying one of above mentioned parameters, it is possible to change the speed of a dc motor.
Sharing is caring:

Discover more from Electrical Engineering 123
Subscribe to get the latest posts sent to your email.